Foram encontradas 50 questões.
Sistemas modernos são monitorados e controlados com ajuda de computadores digitais. Sistemas variantes no tempo são classificados como analógicos e digitais e estes podem ser observados em um mesmo sistema de controle. Por exemplo, um sistema de controle da posição de um motor elétrico rotativo usa um disco óptico com código Gray para medir sua posição. Nesse caso, o sensor é digital e dispensa uso de conversor para ser lido em um computador que controla a posição do motor de natureza analógica.
A respeito do controle e medição de sistemas variantes no tempo, analise as afirmativas abaixo.
I. Um sistema de controle de malha fechada pode também ser chamado de sistema de controle por realimentação.
II. É necessário transformar sinais analógicos em sinais contínuos para que se possam empregar computadores digitais.
III. Sinal discreto é o mesmo que sinal digital.
IV. O controle por antecipação toma sua decisão baseada no sinal de saída.
V. Os sistemas de controle automatizados não podem ser de malha aberta.
Estão corretas
Provas
A respeito de parâmetro e variáveis de processos, considere as afirmativas abaixo.
I. Os parâmetros são grandezas que não variam com a dinâmica do processo.
II. Os parâmetros do processo são grandezas variáveis identificadas por variáveis de saída do processo.
III. Parâmetros de um processo são grandezas constantes que não influenciam no comportamento do processo.
IV. Variáveis do processo também são parâmetros do processo mas a recíproca não é verdadeira.
V. Diferentes parâmetros de processo são envolvidos em cada etapa do processo.
Estão corretas
Provas
A calibração estabelece a relação estática entre a entrada (x) e a saída (y) de um instrumento. Para levantar os dados de calibração, é preciso atuar no mensurando (x), de forma a variar os valores de entrada. O elemento que realiza essa variação é o atuador.
Sobre essa questão, analise as afirmativas abaixo.
I. Um conjunto de leituras de sinais em estado transitório resulta em uma calibração mais eficiente que com sinais estacionários.
II. Os dados de calibração determinam características do instrumento, como linearidade, exatidão e histerese.
III. Para estimar os valores de saída são necessários padrões que devem sempre ser montados em equipamentos distintos daqueles usados como atuador.
IV. A diferença entre dados de calibração e curva de calibração é que os primeiros são obtidos por meio de calibração estática e a segunda é obtida por meio de um modelo matemático ajustado.
V. A graduação da escala em um instrumento analógico ou a faixa de um instrumento digital independem dos resultados de sua calibração.
Estão corretas
Provas
Com base na afirmativa de que quando ocorre uma variação no sinal de entrada de um instrumento de medição do tipo indicador seu ponteiro não se move, é correto afirmar:
Provas
Um sistema de medição qualquer pode ser representado em termo de sinais de entrada desejada (x), entradas indesejadas (xm e xi) e saída (y), como mostrado na figura 2.
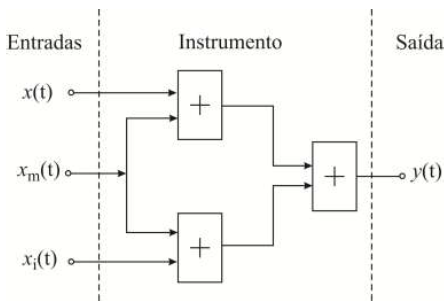
Figura 2 – Diagrama de blocos com sinais de entrada e saída de um sistema de medição
Os sinais de entradas indesejáveis representam efeitos externos que podem afetar o sistema de medição, chamados sinais espúrios. Os sinais espúrios são classificados em sinais de interferências e sinais modificados. As entradas espúrias precisam ser minimizadas para se obter medições desejadas.
Quanto ao assunto, analise as afirmativas seguintes.
I. A realimentação negativa minimiza os efeitos das entradas espúrias;
II. A entrada modificante não é minimizada pela calibração estática;
III. Um exemplo de filtragem da interferência pelo efeito da indução eletromagnética é a blindagem de Faraday.
IV. O método de medir ou estimar as entradas espúrias para minimizar os efeitos destes sinais é semelhante ao método empregado na ação do controle do tipo feedfoward.
V. A utilização de entradas em oposição para minimizar todos os sinais espúrios depende do completo conhecimento desses sinais.
Estão corretas
Provas
Um sistema de medição é constituído de elementos agrupados em subsistemas e é analisado a partir de seus subsistemas. Cada subsistema possui uma função. Seja um instrumento que mede a temperatura em um tanque, como mostrado na figura 1.

Figura 1 – Sistema de medição da temperatura de um tanque.
A respeito dos elementos dos subsistemas e suas funções, analise as afirmativas abaixo.
I. O elemento conversor é o termopar.
II. O elemento termopar é um transdutor elétrico.
III. O elemento termopar é um sensor primário.
IV. O condicionador de sinal é um transdutor.
V. O condicionador de sinal é um controlador.
VI. O sinal de saída do sistema é analógico.
Estão corretas
Provas
O modelo matemático de um instrumento descreve as características de um sistema e pode ser representado por uma função de transferência.
A respeito desse tema, considere as afirmativas seguintes.
I. A função de transferência relaciona o sinal de excitação com o sinal de resposta de um instrumento;
II. A função de transferência descreve tanto características estáticas quanto as dinâmicas;
III. A função de transferência não fornece informações a respeito do desempenho de um sistema
IV. Uma função de transferência que representa um sistema de primeira ordem pode apresentar um comportamento sub amortecido
V. O sobre amortecimento de um instrumento pode ser observado pelo sobressinal obtido de uma função de transferência
Estão corretas
Provas
Os instrumentos empregados em sistemas de medição de processos possuem características estáticas e dinâmicas.
Sobre essas características, analise as afirmativas abaixo.
I. A característica dinâmica de um instrumento é aplicada tanto na medição em malha fechada quanto na medição em malha aberta.
II. As características dos instrumentos devem determinar sua adequação para determinada aplicação.
III. A saturação é uma característica com as mesmas propriedades da não linearidade.
IV. O alcance é uma característica também chamada de faixa dinâmica ou span, que determina o quanto a variação do sinal de entrada não corresponde ao sinal de saída.
V. Deriva ou drift é uma mudança indesejável lenta que acontece em uma característica metrológica de um instrumento que ocorre com o passar do tempo.
Estão corretas:
Provas
Uma bobina, chamada Bobina de Choque, cujo valor de resistência é no máximo dez vezes menor que o valor da sua reatância indutiva, é empregada em circuitos de ignição de sistemas de aquecimento. O menor valor da indutância necessária para uma Bobina de Choque com resistência interna de 10\( \Omega \) operando a 1kHz alimentada por uma tensão de 220Vrms é de
Provas
Seja um circuito elétrico experimental constituído de uma resistência alimentada por uma bateria, mostrado na figura 10(a), em que a tensão terminal VL da bateria, descrita pela curva mostrada na figura 10(a), varia com o aumento da corrente de carga Ic.
Considere que esta bateria possui uma resistência interna Ri.
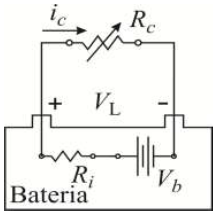
Figura 10(a) – Circuito experimental de uma carga resistiva alimentada por bateria.
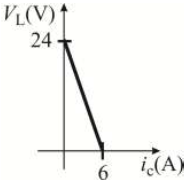
Figura 10(b) – Curva característica da descarga de uma bateria.
Diante desses dados é correto afirmar que a resistência interna da bateria é
Provas
Caderno Container