Um dos benefícios da aplicação do controle em malha fechada de sistemas dinâmicos, se comparado com o controle em malha aberta, é a possibilidade de redução do erro em estado estacionário. Considere o seguinte diagrama de blocos de um sistema de controle em malha fechada, com um controlador proporcional com ganho !$ K_p !$:
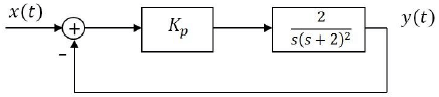
Ao aplicar uma entrada do tipo degrau unitário, é CORRETO afirmar que o erro em estado estacionário desse sistema para !$ K_p=5 !$ é de: