Os servoconversores necessitam de informações de
posição e/ou velocidade para o controle dos
servomotores. Estas informações podem ser estimadas ou
medidas. Nas aplicações de maior precisão, é necessária a
medição por meio de sensores utilizando o sensor
apresentado na figura abaixo. 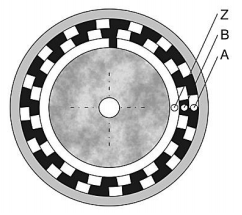 O sensor apresentado na figura acima é denominado:
O sensor apresentado na figura acima é denominado:
O sensor apresentado na figura acima é denominado: