Um engenheiro está projetando um controlador para um braço de robô, acionado por um motor DC alimentado por um amplificador linear DC de potência. Como sensor, usa-se um medidor de ângulo tipo encoder ótico digital, com precisão de 2 graus.
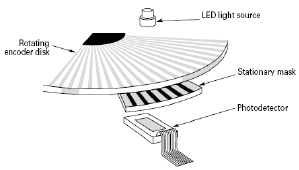
Detalhe de construção do encoder ótico
O braço de robô deve pegar uma carga, girar 45 graus e soltar a carga.
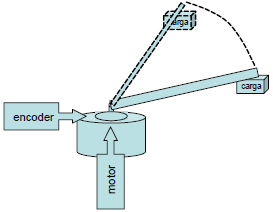
Braço do robô e carga
Como controlador, o engenheiro testou controladores tipo P, PI, PD e PID.
Avalie as três afirmativas a seguir:
I – Se há overshoot, é possível reduzi-lo mudando-se os parâmetros de sintonia do controlador.
II – Para que o erro em regime permanente seja nulo, é preciso que haja componente integral no controlador.
III – O sistema em malha fechada é necessariamente de fase não mínima.