Um sistema de controle em malha fechada do tipo
Proporcional-Integral-Derivativo (PID) com ganho proporcional, Kp , tempo integral, Ti
, e tempo
derivativo, Td , é proposto para uma planta, como pode ser observado no diagrama de blocos
(Figura 4) abaixo: 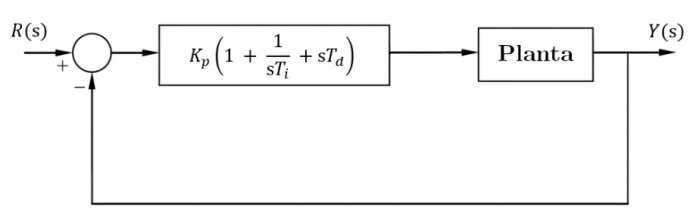
Figura 4
A lei de controle do controlador PID no domínio s, na figura acima, representa a realização do controlador PID na estrutura:
Figura 4
A lei de controle do controlador PID no domínio s, na figura acima, representa a realização do controlador PID na estrutura: