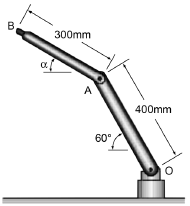
Para que o braço AO de um robô seja posicionado, conforme mostrado na figura, o valor para o ângulo !$ \alpha !$ do braço AB deve ser de 20º, de forma que a distância do ponto O até o atuador em B seja de 650mm.
Para que o braço AO de um robô seja posicionado, conforme mostrado na figura, o valor para o ângulo !$ \alpha !$ do braço AB deve ser de 20º, de forma que a distância do ponto O até o atuador em B seja de 650mm.