
Um sistema de controle realimentado com um controlador PID apresenta a resposta ao degrau unitário mostrada na figura acima. Após uma mudança na sintonia do controlador, o sistema em malha fechada apresentou a resposta ao degrau unitário abaixo.
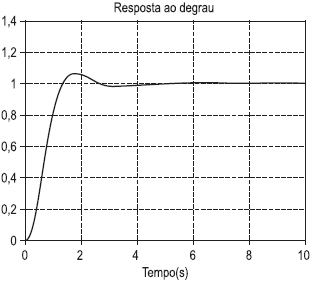
Analisando as figuras, conclui-se que o(s)