A figura a seguir mostra um sistema de controle com realimentação para uma articulação de um braço de robô. Neste diagrama, !$ θ_C !$ é o ângulo desejado de braço do robô, !$ θ_L !$ é o ângulo real braço.
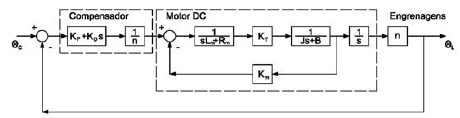
Sabendo que: Lm = 2, Rm = 11, KT = 18 , Km = 0,5, KT = 18, J = 2, B =1 e !$ n !$ = 30, pode-se a afirmar que a função de transferência do sistema em malha fechada !$ \dfrac{θ_L(s)}{θ_C(s)} !$ é dada por:
Provas
Questão presente nas seguintes provas