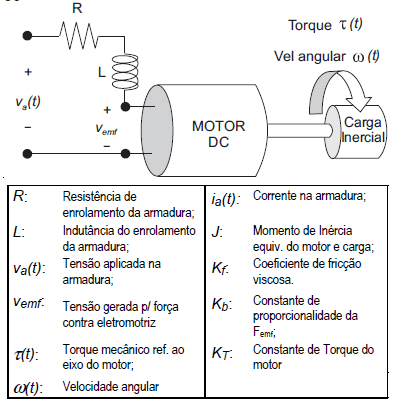
Um motor DC (corrente contínua), cujo esquema está apresentado na figura e cujas variáveis envolvidas estão definidas na tabela, tem o campo excitado por um ímã permanente e tem o seu modelo matemático representado pelas seguintes equações diferenciais:
\( L{\large{di_a \over dt}}+Ri_a(t)+v_{emf}(t)=v_a(t) \) Onde: \( v_{emf}(t)=K_b ω(t) \)
\( J {\large{d ω \over dt}}+K_f ω(t)= \tau(t) \) \( \tau(t)=K_Ti_a(t) \)
Considere o Motor DC como um sistema onde a entrada é a tensão na armadura, a saída é a velocidade angular do motor e um vetor de estado é definido como: x1 a corrente da armadura e x2 a velocidade angular. A matriz da dinâmica para uma representação em espaço de estado de 2ª ordem deste sistema é: