Um sistema de perfuração, em sua forma mais simples, pode ser representado pelo esquema a seguir.
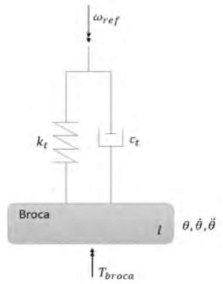
Uma velocidade de referência !$ \omega_{ref} !$ é inserida no sistema, que apresenta momento de inércia polar de massa !$ I !$, rigidez !$ k_t !$ e amortecimento !$ C_t !$ , respectivamente. A broca tem movimentos angulares !$ \theta !$, !$ \dot \theta !$ e !$ \ddot \theta !$. A equação de movimento desse sistema é: