Considere o seguinte modelo em espaço de estados de um sistema linear representado na sua forma matricial:
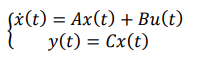 x ∈ Rn, u ∈ Rm, y ∈ Rp
x ∈ Rn, u ∈ Rm, y ∈ Rp
Sendo x o vetor de estados do sistema acima, um engenheiro propõe uma lei de controle por realimentação de estados do formato u = −K1x + K2r para que a saída y(t) siga uma referência constante r. Dado esse contexto, assinale a alternativa que representa a expressão de K2 dado queK1 é conhecido.
x ∈ Rn, u ∈ Rm, y ∈ RpSendo x o vetor de estados do sistema acima, um engenheiro propõe uma lei de controle por realimentação de estados do formato u = −K1x + K2r para que a saída y(t) siga uma referência constante r. Dado esse contexto, assinale a alternativa que representa a expressão de K2 dado queK1 é conhecido.