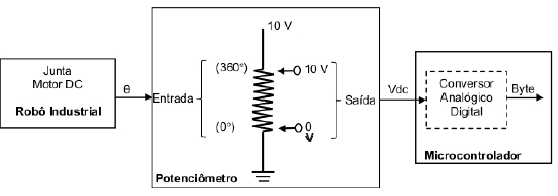
O esquema ilustrado a seguir mostra a base para a realização da leitura do deslocamento angular (θ) de uma junta rotacional de um robô industrial por meio de um microcontrolador. Para tanto, utiliza-se um potenciômetro elétrico como sensor de posição, sendo o seu eixo acoplado ao Motor DC da referida junta. A tensão elétrica do potenciômetro varia na faixa de 0 Vdc a 10 Vdc à medida que o eixo do motor se desloca, a junta posiciona-se em 216º. Nessa situação, indique o byte resultante na saída do conversor analógico/ digital do microcontrolador.