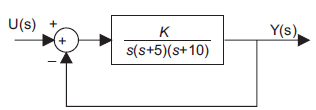
O diagrama da figura acima mostra uma malha de realimentação, característica de sistemas de controle. Para que a função de transferência do sistema em malha fechada garanta a existência de dois pólos imaginários puros, o valor do ganho K deverá ser:
O diagrama da figura acima mostra uma malha de realimentação, característica de sistemas de controle. Para que a função de transferência do sistema em malha fechada garanta a existência de dois pólos imaginários puros, o valor do ganho K deverá ser: