Considere um sistema linear invariante no tempo controlável, cuja representação em
Espaço de Estados é dada por: 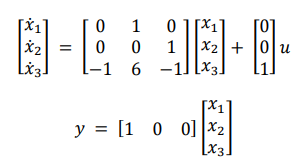
Sendo x = [x1 x2 x3] o vetor de estados do sistema acima, objetiva-se projetar um controlador por realimentação de estados (i.e, u = −Kx) de tal forma a alocar os polos do sistema em malha fechada em -1, -2 e -4. Dado esse contexto, determine o vetor de ganhos K = [K1 K2 K3] necessário para garantir esse requisito.
Sendo x = [x1 x2 x3] o vetor de estados do sistema acima, objetiva-se projetar um controlador por realimentação de estados (i.e, u = −Kx) de tal forma a alocar os polos do sistema em malha fechada em -1, -2 e -4. Dado esse contexto, determine o vetor de ganhos K = [K1 K2 K3] necessário para garantir esse requisito.