A modelagem de sistemas reais em expressões matemáticas, em alguns casos, é um grande desafio para os projetistas de sistemas de controle. Um sistema muito utilizado para o aprendizado é o sistema massa mola, representado na figura abaixo.
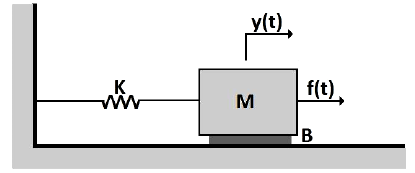
M – Massa, B – Coeficiente de atrito viscoso, K – Constante elástica da mola.
(Inspirado em MAYA, P. A. e LEONARDI, F. Controle Essencial. 1ª Ed., São Paulo: Pearson Prentice Hall, 2011.)
Considerando o Sistema Internacional de Unidades !$ (SI) !$, !$ M = 4, B = 3,2 e K = 0,48 !$, !$ f(t)=u(t) !$ como entrada de uma força aplicada ao bloco, e !$ y = y(t) !$ como saída, a abcissa, assinale a função de transferência do sistema com condições iniciais nulas, ou seja, !$ G(s) = Y(s) U(s) !$ .