Considere o robô mostrado na figura a seguir, tentando alcançar um alvo atrás do obstáculo. Ele foi programado com o comportamento descrito na sequência de 1 até 6. Sensores de contato indicam a colisão com os obstáculos.
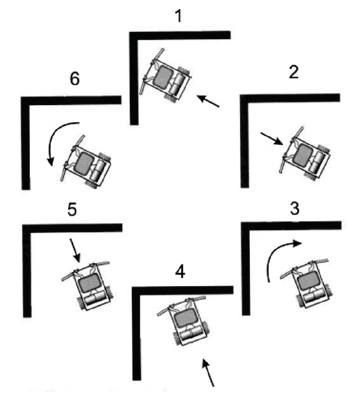
Para escapar dessa condição de mínimo local, basta mudar o comportamento de tal forma que o robô