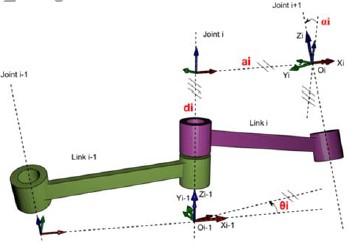
No problema cinemático direto de robôs manipuladores, usando os parâmetros Denavit-Hartenberg, a posição e a orientação do sistema de coordenadas i em relação ao sistema i-1 pode ser definida como uma sequência de quatro transformações, duas rotações (Rot) duas translações (Trans). Com base nas informações da figura, assinale a alternativa que indica a sequência correta das transformações.