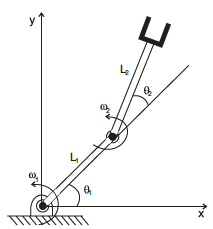
Considere o manipulador robótico com dois braços, duas juntas rotacionais com velocidades constantes !$ ( \omega_1 \,\, e \,\, \omega_2) !$ e uma garra, em uma configuração !$ (\theta_1 \,\, e \,\, \theta_2) !$ qualquer.
É correto afirmar que, nesse sistema, a(s) aceleração(ões):