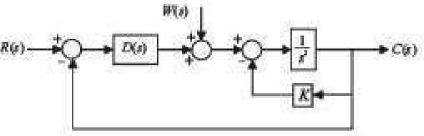
Considereo diagrama em blocos do sistema acima, que representa um esquema de controle cujo objetivo é controlaro ângulo de um pêndulo amortecimento e no qual s é a variável do domínio da transforma de Laplace e K é um ganho positivo. Com base nessas informações bem como no efeito do compensador D (s) na resposta do sistema C(s) devido a entrada R (s) e ao distúrbio W (s), julgue o seguinte item.
Um compensador proporcional derivativo da forma D(s)= s + a, com a>0, possibilita que o sistema possa rastrear uma entrada em rampa unitária com erro estacionário finito.