Um sistema de controle industrial tipo PI opera em uma planta cuja dinâmica é modelada por um polo real, um integrador puro e um ganho estático. A saída é monitorada por um sensor com ganho KS.
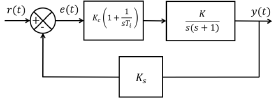
A sintonia do controlador foi devidamente ajustada para um desempenho específico. Entretanto, uma falha no sensor alterou o ganho para metade do valor original e ocasionou em um erro de regime permanente para uma entrada tipo degrau. Nessa nova condição, qual a medida para que o controlador retome o erro estacionário nulo?