Considere a seguinte figura para a questão.
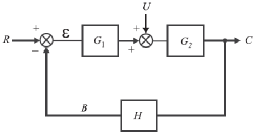
Considerando as seguintes funções de transferência para esse sistema:
!$ G_1(s) = K { \large s + 2 \over s} !$ (controlador PI)
!$ G_2 = { \large (s -2) \over ( s+ 1) ( s -1)} !$ (Planta)
!$ H(s) = 1 !$ (Realimentação unitária)
onde o valor de K > 0 representa ganho a ser ajustado no controlador PI. Pelo lugar das raízes, conclui-se que o sistema em malha fechada será