Considerar seguinte Sistema de controle para a questão.
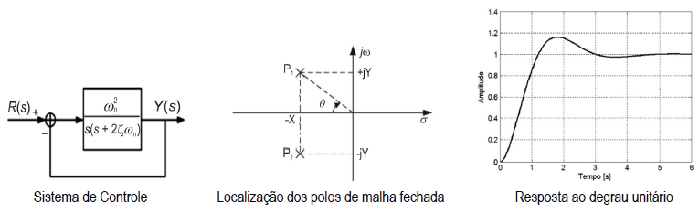
Considere o sistema de controle, em malha fechada com realimentação unitária da função \( G(s) = { \large \omega^2_n \over s(s + 2\zeta \omega_n)} \) com seus polos indicados através de \( P_{1,2} = -X \pm jY \) no plano complexo e sua resposta transitória à entrada R(s) degrau unitário representados conforme a figura apresentada anteriormente.
A respeito da relação entre o referido sistema, o posicionamento de seus polos e sua resposta transitória é correto afirmar que