Controladores Proporcional-Integral-Derivativo (PID), embora possuam estrutura relativamente simples, demonstram ser satisfatórios para o controle de grande variedade de processos.
O controlador PID é capaz de eliminar erros de regime permanente (ação integral), antecipar o comportamento do processo (ação derivativa) e reagir ao erro presente, conferindo ao sistema de controle uma reação rápida à ação de perturbações ou variações de referência de magnitudes significativas (ação proporcional).
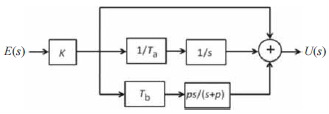
O diagrama em blocos de um controlador PID convencional é apresentado a seguir.
Com base nessas informações, julgue o item subsequente.
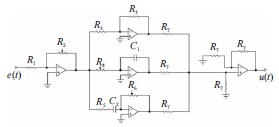
Uma possível realização do diagrama de blocos é dada pelo circuito abaixo, utilizando amplificadores operacionais, resistores, potenciômetros e capacitores. O ganho, a constante de tempo integral, a constante de tempo derivativo e o pólo são dados por K = R2/R1, Ti = C1R4, Td = C2R6 e p = C2R5, respectivamente.