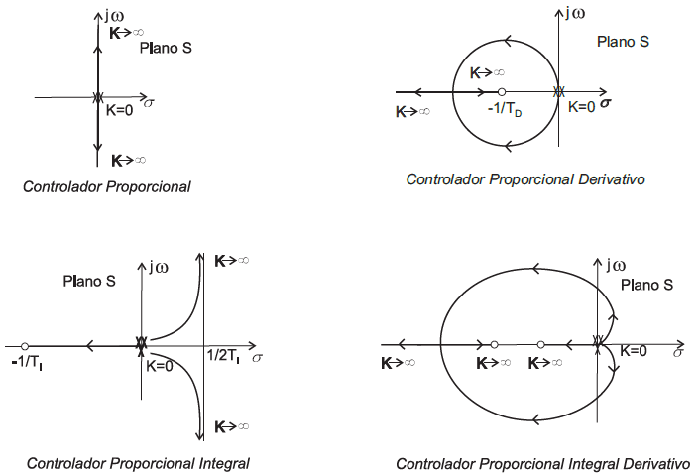
As figuras acima apresentam o comportamento de um sistema de controle para diferentes ajustes de um controlador da família PID. Considerando que se deseja uma resposta estável, rápida, e não oscilatória para a malha fechada, a melhor escolha para o projeto é o controle do tipo: