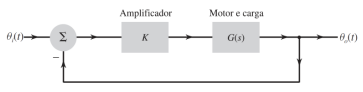
A figura a seguir representa um sistema de controle
automático de posição angular de um objeto. A entrada θi(t) é a
posição angular desejada do objeto. A saída θo(t) é a posição
angular medida do objeto. A diferença entre entrada e saída é
amplificada com o uso de um amplificador ideal com ganho K e
aplicada à entrada do motor (com a carga). A função de
transferência que relaciona os sinais de entrada e saída do
conjunto motor e carga é G(s) = 1/(s2 + 8s).
Considerando as informações apresentadas, é correto afirmar que, para que o sistema de controle seja criticamente amortecido, é necessário que o ganho K seja igual a
Considerando as informações apresentadas, é correto afirmar que, para que o sistema de controle seja criticamente amortecido, é necessário que o ganho K seja igual a
Provas
Questão presente nas seguintes provas