Deseja-se utilizar o circuito a seguir como controlador eletrônico
proporcional-integral-derivativo (PID) em uma planta de controle
industrial.
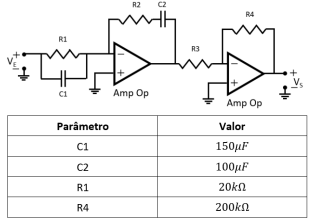
Os valores de R2 e R3 para que a função de transferência desejada seja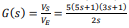 são, respectivamente,
são, respectivamente,
Os valores de R2 e R3 para que a função de transferência desejada seja