Foram encontradas 60 questões.
Considerando as definições de controle, limitação e proteção em sistemas de Instrumentação e Controle (I&C), associe corretamente cada função ao seu conceito.
1. Controle 2. Limitação 3. Proteção
( ) Levar imediatamente o sistema a um estado seguro quando ocorre uma condição perigosa, como falha de sensor, sobrepressão ou emergência;
( ) Evitar que os atuadores e as variáveis ultrapassem valores físicos ou operacionais máximos;
( ) Manter a variável de processo próxima ao valor desejado, mesmo diante de perturbações.
A sequência correta, na ordem apresentada é
Provas
Para interfacear com a entrada analógica (0 a 5 V) do CLP, utiliza-se um resistor shunt de 250 Ω.
Admita comportamento linear do transmissor e componentes ideais.
No instante analisado, a temperatura indicada pelo sensor é 250 °C. A queda de tensão no resistor shunt aplicada à entrada do CLP é igual a
Provas
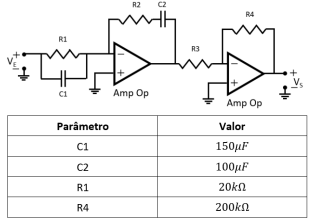
Os valores de R2 e R3 para que a função de transferência desejada seja
Provas
O circuito combinacional a seguir possui três entradas digitais (A, B e C) e uma saída S.
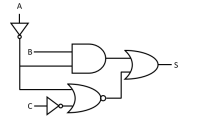
É correto afirmar que o circuito implementado é um
Provas
A respeito dos principais elementos finais de controle, analise as afirmativas abaixo:
I. O atuador é o dispositivo que recebe o sinal elétrico, pneumático ou hidráulico do controlador e gera movimento mecânico sobre o elemento final.
II. O controlador é um elemento final de controle que executa a lógica de malha, ajustando automaticamente o ponto de trabalho de processo conforme variações externas.
III. O posicionador tem a função de eliminar histerese e atrito no atuador, garantindo que a posição da válvula corresponda com exatidão ao sinal de controle.
É correto o que se afirma em
Provas
No circuito a seguir, o diodo D2 é conhecido como diodo de roda livre. Ele é empregado em circuitos de chaveamento com o intuito de fornecer um caminho para a corrente de descarga do indutor quando a chave S é aberta. Neste caso, a chave é fechada em t = 0s e aberta em t = 3ms.
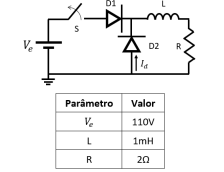
Considerando todos os componentes ideais e sabendo-se que o indutor L está descarregado quando a chave S é fechada, a corrente Id no diodo D2 é
Provas
Um sistema de controle digital utiliza um microcontrolador para amostrar a resposta de um sensor de temperatura e atuar sobre uma válvula proporcional. O modelo contínuo simplificado do processo é:
![]()
O sistema é amostrado a uma frequência de 10 Hz e implementado em um microcontrolador ARM com conversores A/D e D/A de 12 bits. Deseja-se converter este sistema para o domínio discreto utilizando o método da transformação por retenção de ordem zero (ZOH).
O modelo discreto G(z) equivalente aproximado, utilizando o
método da substituição ![]() onde o período de amostragem T = 0,1s é
onde o período de amostragem T = 0,1s é
Provas
Um sistema de controle digital utiliza um microcontrolador para amostrar a resposta de um sensor de temperatura e atuar sobre uma válvula proporcional. O modelo contínuo simplificado do processo é:
![]()
O sistema é amostrado a uma frequência de 10 Hz e implementado em um microcontrolador ARM com conversores A/D e D/A de 12 bits. Deseja-se converter este sistema para o domínio discreto utilizando o método da transformação por retenção de ordem zero (ZOH).
Provas
Um sistema físico massa–mola–amortecedor é descrito pela equação diferencial:
![]()
onde x(t) é o deslocamento da massa e F(t) é a força aplicada pelo atuador.
Deseja-se controlar a posição da massa por meio de um controlador PID, que recebe como entrada o erro entre a referência r(t) e a posição medida x(t). O sinal de controle gerado pelo PID é u(t), o qual atua sobre um driver de motor que converte o sinal elétrico de controle em força mecânica segundo: F(t) = Ka u(t), onde Ka é a constante de ganho do atuador.
Com base na modelagem matemática e nos princípios de malhas de controle, é correto afirmar que
Provas
Durante a fase de projeto, o engenheiro modela o sistema pela seguinte função de transferência linearizada:
onde K representa o ganho do processo e t é a constante de tempo térmica do sistema.
Com base nesses conceitos, analise as afirmativas a seguir:
I. A constante de tempo t indica a rapidez da resposta do sistema a uma perturbação, sendo tanto menor quanto mais rápido o processo atingir o regime permanente.
II. O ganho K representa a sensibilidade do processo, isto é, a razão entre a variação da variável de saída e a variação da variável manipulada em regime permanente.
III. O controlador ajusta a válvula com base na comparação entre o valor medido e o valor de referência em um sistema de malha aberta.
É correto o que se afirma em
Provas
Caderno Container