Foram encontradas 50 questões.
Na programação de robôs industriais é necessário a localização tridimensional dos elos, das articulações e do órgão terminal. Essa localização é formalmente definida por um vetor de posição e sua movimentação relacionada por matrizes de rotação. A posição do órgão terminal é dada pelo vetor A P = [1 3 0] T se for girado em torno do eixo Z em 30º, qual sua posição após o movimento?
Provas
Questão presente nas seguintes provas
A utilização de sensores nos robôs industriais está além do próprio funcionamento do robô, sendo utilizado para a interação com as operações e com o ambiente. Um manipulador industrial deve reconhecer o tipo de material da peça e alterar a força do órgão terminal. Nesse sistema há peças metálicas e plásticas, para realizar a tarefa foram utilizados sensores
Provas
Questão presente nas seguintes provas
A figura a seguir representa a forma de uma coluna flambada.
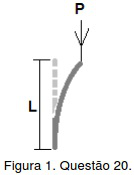
O tipo de fixação e o comprimento livre de flambagem representado na figura são, respectivamente,
O tipo de fixação e o comprimento livre de flambagem representado na figura são, respectivamente,
Provas
Questão presente nas seguintes provas
A figura representa um sistema de transmissão por correias.
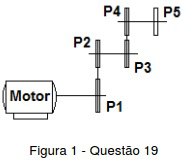
Dados: Diâmetros das polias: DP1 = 216 mm; DP2 = 540 mm; DP3 = 220 mm; DP4 = 440 mm; DP5 = 250 mm. Mt (motor) = 100 Nm. n = 1200 rpm. Desprezar as perdas.
Qual a força tangencial na polia 5 (P5)?
Dados: Diâmetros das polias: DP1 = 216 mm; DP2 = 540 mm; DP3 = 220 mm; DP4 = 440 mm; DP5 = 250 mm. Mt (motor) = 100 Nm. n = 1200 rpm. Desprezar as perdas.
Qual a força tangencial na polia 5 (P5)?
Provas
Questão presente nas seguintes provas
Ao analisar uma viga em balanço, o diagrama resultante de força cortante Q e momento fletor M está apresentado na figura a seguir.
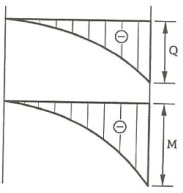
Qual o carregamento correto da viga?
Qual o carregamento correto da viga?
Provas
Questão presente nas seguintes provas
Na fixação de uma máquina observou-se uma estrutura hiperestática, que foi simplificada para análise como mostra a figura. 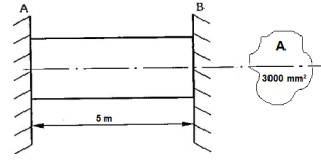 Adaptado de MELCONIAN, S. Mecânica Técnica e Resistência dos Materiais. 18ª Edição. Ed. Érica. São Paulo. 2007. Dados: Material: aço; E = 2,1.105 Mpa; α = 1,2.10-5 ºC-1; ∆l = l0 . α . ∆T; σ = E . ε
Adaptado de MELCONIAN, S. Mecânica Técnica e Resistência dos Materiais. 18ª Edição. Ed. Érica. São Paulo. 2007. Dados: Material: aço; E = 2,1.105 Mpa; α = 1,2.10-5 ºC-1; ∆l = l0 . α . ∆T; σ = E . ε
Qual a força térmica originada na viga, considerando uma variação de temperatura de 10 ºC?
Adaptado de MELCONIAN, S. Mecânica Técnica e Resistência dos Materiais. 18ª Edição. Ed. Érica. São Paulo. 2007. Dados: Material: aço; E = 2,1.105 Mpa; α = 1,2.10-5 ºC-1; ∆l = l0 . α . ∆T; σ = E . εQual a força térmica originada na viga, considerando uma variação de temperatura de 10 ºC?
Provas
Questão presente nas seguintes provas
O símbolo apresentado na figura abaixo indica o estado da superfície.
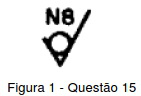
Este símbolo indica que a remoção de material
Este símbolo indica que a remoção de material
Provas
Questão presente nas seguintes provas
A NBR 6409 estabelece a simbologia para a representação das tolerâncias geométricas. A figura abaixo representa a indicação de uma tolerância geométrica de cilindricidade de um eixo.
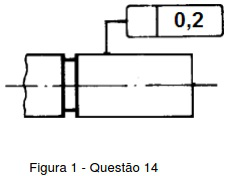
Qual é símbolo que completa a figura corretamente?
Provas
Questão presente nas seguintes provas
A figura abaixo é típica de programas de computador utilizado em um dos componentes do sistema CIM.
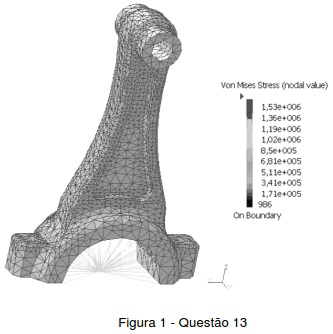
Qual é o componente do CIM que a figura representa?
Qual é o componente do CIM que a figura representa?
Provas
Questão presente nas seguintes provas
O relógio comparador é um instrumento muito utilizado no controle dimensional no chão de fábrica porque permite realizar medições com resolução e rapidez. A figura abaixo representa a medição de um ressalto em dois passos.
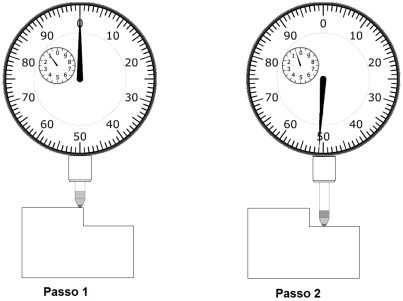
Adaptado de STEFANELLI, disponível em: http://www.stefanelli.eng.br/webpage/noindex/i-metrologia.html
De acordo com a figura, qual a altura do ressalto?
Provas
Questão presente nas seguintes provas
Cadernos
Caderno Container