Foram encontradas 91 questões.
O Sistema GPS é composto por três segmentos principais. São eles:
Provas
As estações cujas coordenadas são determinadas com GPS possuem a altitude referida à superfície do elipsoide. Entretanto, a superfície de referência altimétrica adotada no Brasil é o geoide. A altitude referida à superfície do elipsoide e a altitude referida ao geoide são chamadas respectivamente:
Provas
As efemérides contêm informações referentes à posição e ao erro do relógio dos satélites necessários no posicionamento. A precisão dessas informações depende do tipo de efeméride que está sendo utilizado. Há basicamente dois tipos de efemérides:
Provas
As redes geodésicas do SGB podem ser classificadas em três tipos: ___________, que é definida por um conjunto de marcos com coordenadas planimétricas, latitude e longitude de alta precisão; ___________, responsável por fornecer altitude ortométrica de alta precisão para os marcos definidores dessa rede; e ___________ a que fornece informações gravimétricas.
Assinale a opção que complementa correta e respectivamente as lacunas do texto acima.
Provas
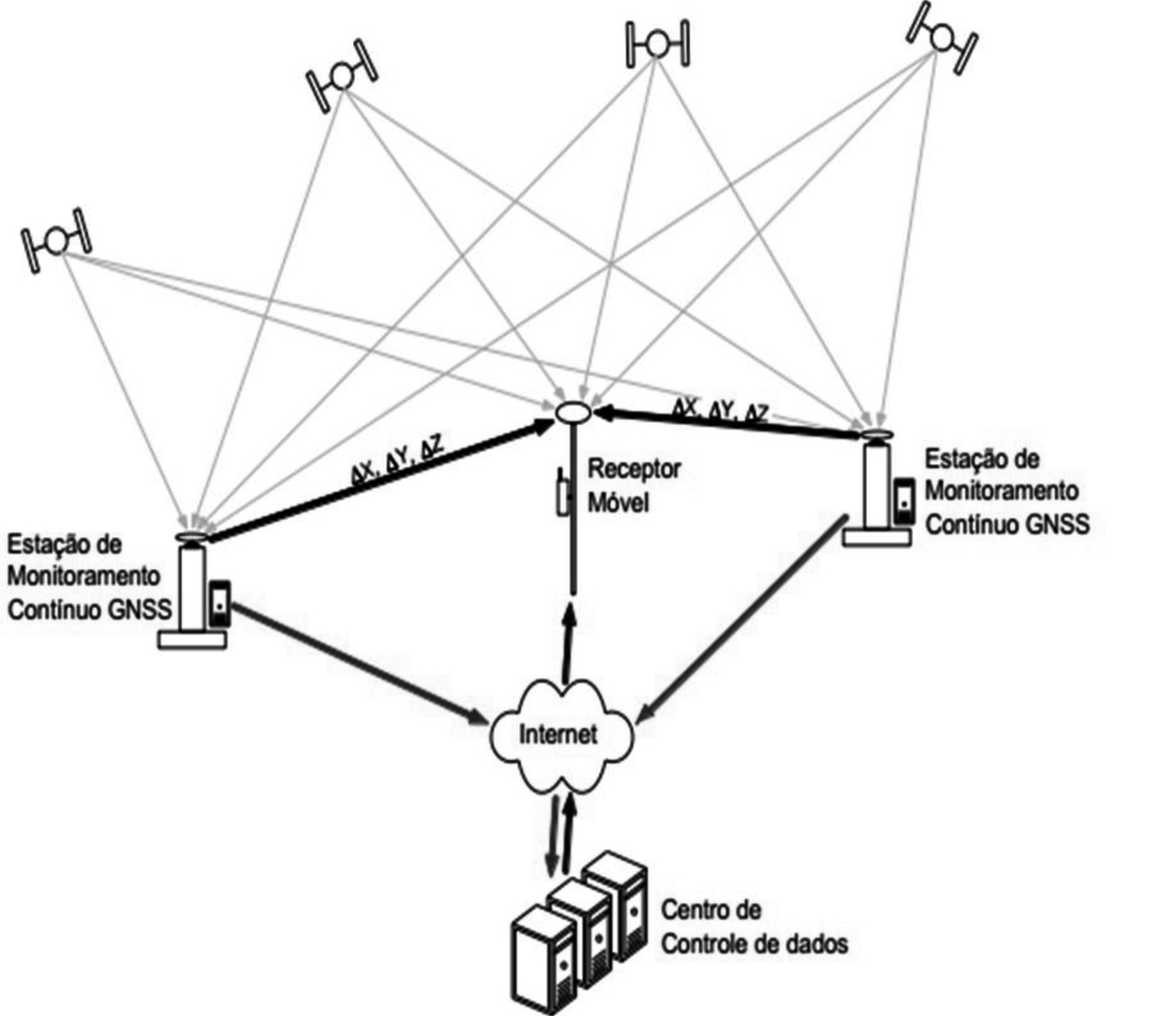
A figura a seguir representa o sistema denominado:
Provas
Considere as afirmativas abaixo e indique V para verdadeira e F para falsa.
( ) Com o posicionamento por ponto preciso, as coordenadas do vértice de interesse são determinadas de forma absoluta.
( ) O método PPP dispensa o uso de receptor instalado sobre um vértice de coordenadas conhecidas.
( ) O IBGE disponibiliza um serviço on-line de PPP, que processa dados no modo estático e cinemático.
Assinale a alternativa correta.
Provas
Os métodos de posicionamento RTK (Real Time Kinematic) e DGPS (Differential GPS) são executados pela transmissão instantânea de dados de correções dos sinais de satélites, do(s) receptor(es) instalado(s) no(s) vértice(s) de referência, ao(s) receptor(es) que percorre(m) os vértices de interesse (rover). A diferença básica entre o método RTK e o método DGPS é que:
Provas
Considere as afirmativas abaixo e indique V para verdadeira e F para falsa.
( ) O posicionamento relativo estático rápido é similar ao relativo estático, porém, a diferença básica é a duração da sessão de rastreio, que, no primeiro caso, é inferior a 20 minutos.
( ) O posicionamento relativo estático rápido é uma transição entre o estático e o cinemático. O receptor que ocupa o vértice de interesse permanece estático, porém num tempo de ocupação bastante curto, necessitando coletar dados no deslocamento entre um vértice de interesse e outro.
( ) No posicionamento relativo cinemático, enquanto um ou mais receptores estão estacionados no(s) vértice(s) de referência, o(s) receptor(es) que coleta(m) dados dos vértices de interesse permanece(m) em movimento. A cada instante de observação, que coincide com o intervalo de gravação, é determinado um conjunto de coordenadas.
Assinale a alternativa correta.
Provas
A figura abaixo representa um método de levantamento conhecido como:

Provas
O sistema GNSS criado por meio do esforço de alguns países europeus e de seus colaboradores, como por exemplo, Canadá e Japão, sob o controle e responsabilidade civil, sendo a ESA (European Space Agency) uma das instituições responsáveis pelo seu desenvolvimento, é denominado:
Provas
Caderno Container