Foram encontradas 8.958 questões.
A energia eletromagnética detectada por sensores remotos orbitais passa através de uma camada de atmosfera, causando o denominado Efeito Atmosférico sobre a radiação que chega ao sensor. O mecanismo causante do efeito atmosférico que está associado à definição correta é
Provas
Seja o trecho de uma estrada de 500m de comprimento, cujos pontos inicial e final se situam sobre o meridiano de longitude -57º. Considerando a deformação linear, ao se utilizar o sistema UTM para desenhar uma planta na escala 1:1200, a representação do trecho terá, em cm, o comprimento de
Provas
Considere o extrato de Mapa Índice da figura a seguir.
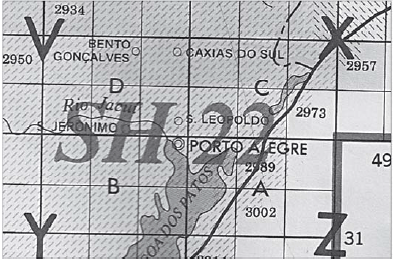
Diretoria de Serviço Geográfico (DSG). Mapa-Índice no 21.1994.
A cidade de Caxias do Sul está representada na folha de carta topográfica, na escala 1:50.000, cujo Índice de Nomenclatura é
Provas
Considere o extrato da folha de carta topográfica a seguir, na escala 1:25.000:
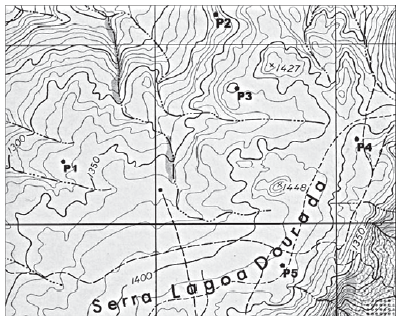
DSG. Folha de Carta Topográfica ALTAMIRA. Minas Gerais. Edição e Impressão: 1980. (Adaptado)
Qual dos 5 pontos marcados na folha está situado em maior altitude?
Provas
Na tabela a seguir, constam 5 pontos com suas respectivas coordenadas no sistema UTM, utilizado no Mapeamento Sistemático Brasileiro.
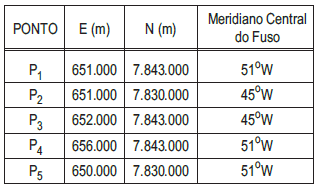
De acordo com a tabela, qual é a menor distância entre dois pontos?
Provas
No sistema UTM, a Convergência Meridiana Plana corresponde ao(à)
Provas
Na projeção cônica conforme de Lambert, com paralelopadrão !$ phi !$ = 45º, os paralelos e os meridianos são representados
Provas
Considere os pontos P1 e P2 sobre uma esfera de referência, com as seguintes coordenadas:
P1: = 0º ; = - 50º
P2: = 20º ; = -10º
Uma linha l sobre a esfera, unindo P1 a P2, mantém o mesmo rumo ao interceptar qualquer meridiano. Na projeção cilíndrica conforme de Mercator, a linha l é representada por um(a)
Provas
Analise as sentenças a seguir.
As formas das feições poligonais existentes na superfície de um elipsoide são mantidas ao se projetá-las em um plano, a partir de uma projeção equivalente.
PORQUE
As projeções equivalentes têm a propriedade de conservar os ângulos entre as linhas da superfície de referência.
A esse respeito, conclui-se que
Provas
Sobre o posicionamento relativo GNSS, considere as afirmativas a seguir.
I – Os dados do posicionamento relativo cinemático podem ser processados após a coleta (pós-processados) ou durante a própria coleta (tempo real).
II – No posicionamento relativo estático rápido, podem ser empregados receptores de simples (L1) ou de dupla frequência (L2).
III – Os receptores utilizados em um sistema RTK (Real Time Kinematic) devem ser de dupla frequência.
É(São) correta(s) APENAS a(s) afirmativa(s)
Provas
Caderno Container