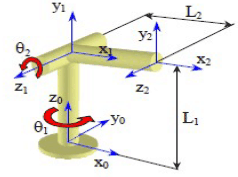
Considerando a cadeia cinemática do manipulador RR no espaço:
O ponto considerado para a determinação desta cinemática inversa é a origem do sistema cartesiano 2 com suas coordenadas em relação ao sistema cartesiano da base do manipulador 0x0y0z0: 002(x,y,z).
Assinale a alternativa que representa o conjunto de equações referente às variáveis de junta do manipulador q = [ϴ1 , ϴ2]T que representa a CORRETA cinemática inversa desse manipulador.