Uma planta industrial foi inserida em uma malha de controle utilizando-se um canal de realimentação com ganho proporcional K, conforme ilustrado na Figura abaixo.
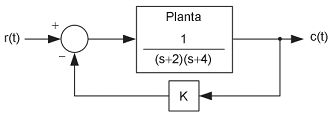
Aplicando-se um sinal tipo degrau na entrada r(t), o valor do ganho K para que a saída c(t) do sistema em malha fechada tenha um comportamento criticamente amortecido (polos reais e iguais) é