O engenheiro responsável por uma planta industrial alterou
seu comportamento dinâmico por meio de realimentação
unitária, conforme ilustrado na Figura abaixo.
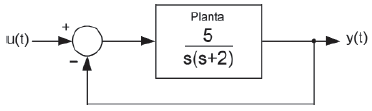
Dessa forma, em malha fechada, as novas posições dos polos no plano s serão:
Dessa forma, em malha fechada, as novas posições dos polos no plano s serão: