Considerando a cadeia cinemática do manipulador planar RR:
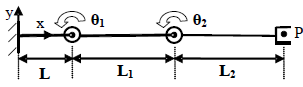
Assinale a alternativa que define o conjunto de equações, referente às coordenadas do ponto central da garra P(px,py) em relação ao sistema de referência cartesiano 0xy, e que representa a CORRETA cinemática direta de posição deste manipulador.