Considere o manipulador RP no espaço e sua respectiva cinemática direta de posição:
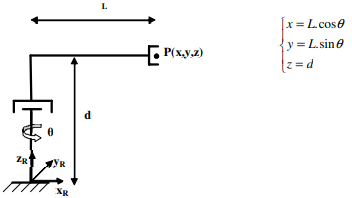
Qual das alternativas abaixo representa as velocidades das juntas do manipulador em função das velocidades da trajetória no espaço cartesiano, ou seja, a correta matriz jacobiana inversa (J-1) desse manipulador?
!$ \begin{bmatrix} d \theta \\ dd \end{bmatrix} = J^{-1} \begin{bmatrix} dx \\ dy \\ dz \end{bmatrix} !$