Na função de transferência a seguir, apresenta-se o modelo matemático para um compensador digital C(z) utilizado no controle de posição de um motor de corrente contínua:
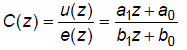
Onde u(z) é o sinal de saída do compensador; e(z) é o sinal de erro do sistema de controle; z é o operador da transformada Z;a0 = 0,5; a1 = 0,765; b0 = -0,333; e b1 = 1.
Com o objetivo de implementar o compensador com os dados acima em um microcontrolador, qual alternativa apresenta a equação a diferenças correta?
Provas
Questão presente nas seguintes provas
Professor PEBTT - Eletroeletrônica e Mecatrônica
40 Questões