Foram encontradas 40 questões.
As Redes Neurais Artificiais (RNAs) podem ser entendidas como modelos computacionais com capacidade de aprender, adaptar, generalizar, agrupar ou organizar dados, além de possuírem certa robustez a ruídos e tolerância a falhas. A estrutura básica operacional das RNAs está baseada em blocos construtivos semelhantes entre si e que realizam o processamento de forma paralela – sua unidade básica é o neurônico artificial (modelo matemático), exemplificado pela figura a seguir:
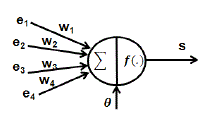
Onde: e1, e2, e3 e e4 são as informações de entradas do neurônio; w1, w2, w3 e w4 são os pesos aplicados nas entradas (ponderações); Σ é um nó ou ponto de soma; f(.) é a função de ativação, que recebe a soma ponderada das entradas e gera a informação s na saída.
Com base nos diversos campos de estudos que fundamentam os atuais princípios teóricos da Inteligência Artificial, em qual abordagem as RNAs estão baseadas?
Provas
“É um Robô que possui duas juntas dispostas em paralelo para se ter movimento em um plano e uma junta prismática perpendicular a este plano (PRR), apresentando, portanto, uma translação e duas rotações.”
As características descritas no texto acima são de um robô do tipo:
Provas
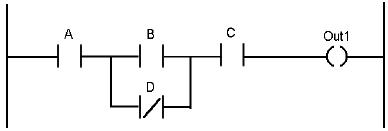
Assinale a expressão lógica que representa a função programada em linguagem Ladder mostrada na figura a seguir.
Provas
A figura abaixo apresenta um circuito diferenciador utilizando um amplificador operacional ideal:
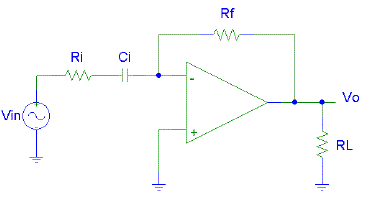
Onde: Ri = 2kΩ, Rf = 6kΩ, RL = 1MΩ, Ci = 1μF, Vin é o sinal de entrada e Vo é o sinal de saída.
Para o circuito apresentando, considerando-o em regime permanente senoidal, qual o valor para a frequência angular torna o módulo do ganho do diferenciador unitário?
Provas
O diagrama abaixo exemplifica uma malha de controle digital:
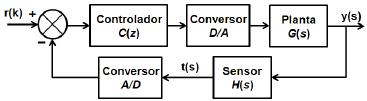
A implementação do controlador C(z) é realizada através de um microcontrolador que, a cada período de tempo de T segundos, executa a iteração de número k. O pseudocódigo, a seguir, exemplifica o conjunto de instruções executado a cada iteração do sistema:
|
*/Início da iteração k * /Ler t(k) do Conversor A/D; Ler r(k) da Memória; Calcular e(k)= r(k) - t(k); Calcular u(k)= 0,61e(k) - 0,27e(k-1) + 0,13u(k-1); Escrever u(k) no Conversor D/A; e(k-1) = e(k); u(k-1) = u(k); Fazer k = k+1; /*Fim da iteração k */ |
Qual a função de transferência para o controlador digital C(z) = U(z)/E(z)?
Provas
Na função de transferência a seguir, apresenta-se o modelo matemático para um compensador digital C(z) utilizado no controle de posição de um motor de corrente contínua:
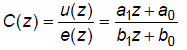
Onde u(z) é o sinal de saída do compensador; e(z) é o sinal de erro do sistema de controle; z é o operador da transformada Z;a0 = 0,5; a1 = 0,765; b0 = -0,333; e b1 = 1.
Com o objetivo de implementar o compensador com os dados acima em um microcontrolador, qual alternativa apresenta a equação a diferenças correta?
Provas
Na programação de microcontroladores da família PIC, o registrador TRIS é responsável pela definição do fluxo de dados, ou seja, definir se os pinos do chip serão configurados como entradas ou saídas. Deste modo, quando o programador quiser que todos os pinos da porta B sejam entradas, qual a alternativa que realiza tal função?
Provas
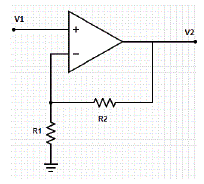
Amplificadores operacionais ou Amp Ops são dispositivos que têm dois terminais de entrada. Associados a diferentes configurações de resistências, sua saída pode ser não inversora, inversora, somador, dentre outras.
No circuito, mostrado a seguir, utiliza-se um amplificador operacional em um arranjo simples. Pode- se afirmar que a saída V2, com relação a entrada V1, será:
Provas
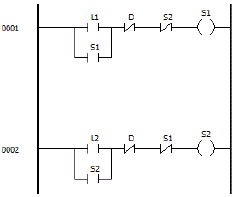
O uso de Controladores Lógicos Programáveis é de grande importância para acionamentos de equipamentos no âmbito mundial. Além da importância econômica em virtude das facilidades e funcionalidades, destaca-se, também, a questão da segurança para fazer certos acionamentos. Um dos sistemas de segurança utilizados é o intertravamento. Com essa técnica alguns equipamentos têm seus ligamentos impossibilitados devido à utilização de outros equipamentos.
Com base no sistema de acionamento em linguagem Ladder, mostrado a seguir, podemos afirmar que:
Provas
Uma das linguagens gráficas mais utilizadas para realizar a programação de Controladores Lógicos Programáveis (CLPs) é o diagrama Ladder; um exemplo para este diagrama pode ser observado na figura a seguir:
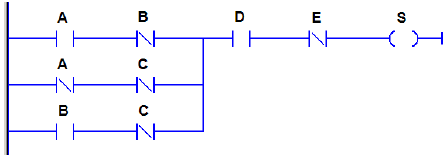
Para o diagrama Ladder apresentado, utilize a álgebra de Boole para determinar a equação lógica da programação.
Provas
Caderno Container