Para compensar o sistema dinâmico por um controlador por derivativo ideal, deve-se adotar uma ultrapassagem percentual de 16% e uma redução de três vezes no tempo de assentamento na resposta ao degrau escalar unitário em relação ao processo em malha fechada sem compensação.
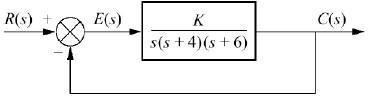
O valor do zero do compensador é de, aproximadamente: