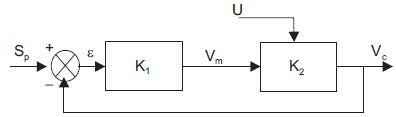
A figura a seguir ilustra a malha de controle de um sistema simples de regulação.
Onde:
Sp :Set-point
!$ ε !$: Erro
K1:Função de transferência do regulador
K2:Função de transferência do processo
Vc: Variável controlada
U: Perturbação
Vm:Variável manipulada
Com base nas informações, o erro de regime ( !$ ε !$ ) será