Em sistemas de controle lineares e contínuos no tempo, o controlador PID produz o sinal de controle u(t), a partir do sinal de erro e(t), através da seguinte equação:
!$ u(t) = K_p e(t) + K_i \int_{0}^{t} e (\tau) d \tau + K_d {\large{de(t) \over dt}} !$
Uma forma prática de se construir um controlador eletrônico do tipo PID é mostrada no diagrama de circuito abaixo.
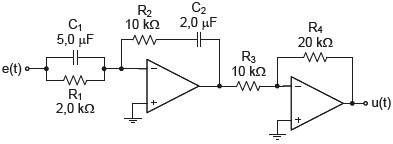
Considerando-se os amplificadores operacionais ideais, o ganho integral Ki desse controlador PID, expresso em s-1, é igual a