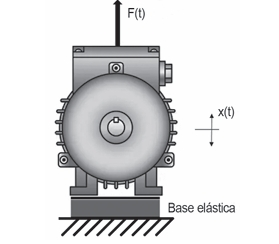
Um motor elétrico, modelado como sistema de um grau
de liberdade (deslocamento vertical x), é apoiado sobre
uma base elástica de rigidez k e está sujeito a um forçamento harmônico F (t) = Fo
sen ( t), conforme mostrado
na Figura.
t), conforme mostrado
na Figura.
O motor possui um seletor de velocidades que o permite operar em 4 rotações distintas, tais que n1 < n2 < n3 < n4 . A frequência natural do sistema tem seu valor entre n2 e n3 , e a amplitude do movimento vibratório do motor é a mesma nas rotações n2 e n3.
As menores amplitudes do deslocamento vibratório do motor, desconsiderando-se qualquer efeito dissipativo no sistema, ocorrem nas rotações
O motor possui um seletor de velocidades que o permite operar em 4 rotações distintas, tais que n1 < n2 < n3 < n4 . A frequência natural do sistema tem seu valor entre n2 e n3 , e a amplitude do movimento vibratório do motor é a mesma nas rotações n2 e n3.
As menores amplitudes do deslocamento vibratório do motor, desconsiderando-se qualquer efeito dissipativo no sistema, ocorrem nas rotações