Um controlador PID discreto C(z) foi sintonizado para controlar um processo G(z) conforme descrito no diagrama de blocos abaixo. O sistema controlado é capaz de seguir a referência constante de valor unitário, de modo que o erro em estado estacionário converge para zero, conforme mostrado nos gráficos abaixo.
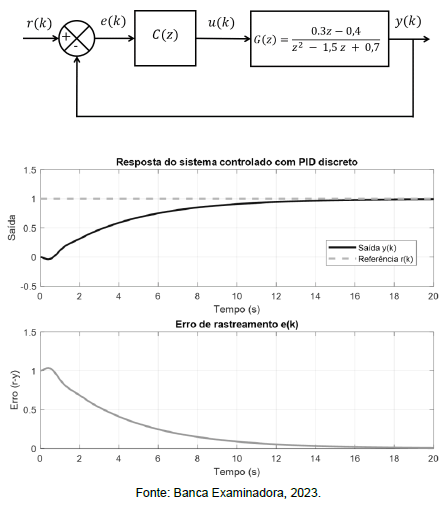
Dado que o ganho estático de um sistema discreto é obtido avaliando-se G(z=1), o valor da ação integral deste controlador a partir do instante em que erro e(k) tende a zero é