Considere o processo em malha fechada configurado conforme abaixo:
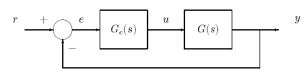
onde r representa o sinal de referência, e representa o sinal de erro, u representa o sinal de controle e y, a saída do sistema. G(s) e Gc(s) são as funções de transferência do processo a ser controlado e do controlador, respectivamente. Avalie as afirmações a seguir:
I) Para obter o controle proporcional-integral-derivativo PID pelo método heurístico de Ziegler-Nichols, é necessário obter a curva de reação da planta G(s) ao degrau e extrair os parâmetros do controlador a partir de uma tabela com base na curva obtida.
II) Se o sistema for controlado apenas com ganho proporcional Gc(s)=Kp, ao aumentar este ganho, consegue-se reduzir o erro em regime permanente até eliminá-lo.
III) Para processos cuja saída y apresenta elevado sobressinal, ao inserir a ação derivativa, consegue-se resposta mais rápida, com menor pico. Mas esta ação de controle também pode aumentar o erro em regime.
IV) O controle integral garante erro nulo em regime, porém tende a introduzir sobressinal ao sistema, podendo levar à saturação da ação de controle.
V) A função de transferência do sistema em malha fechada é dada por:
!$ M(s)= \dfrac {G_c (s) G(S)}{l+G_c (s) g(s)} !$
Sobre as afirmações acima se pode dizer que: