Um engenheiro realizou experimentos de acompanhamento, ao longo do tempo t, da resposta y de um processo em malha fechada com um controlador P, para degrau unitário, em t = 0, no set-point. Para cada experimento, foi adotada uma sintonia diferente (Kc = 4; 6; 8; 10; 12), conforme as figuras abaixo.
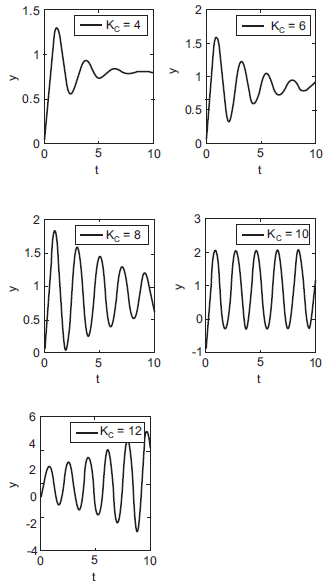
O engenheiro pôde, então, concluir que o ganho crítico (ou último), que corresponde ao limite de estabilidade para esse sistema, é