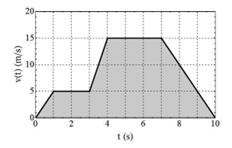
O gráfico a seguir mostra o movimento de um braço
robótico que executa um movimento linear de translação,
de modo que a sua velocidade v(t) varia no tempo t no
intervalo temporal em que ocorre. Nos sistemas
mecânicos industriais, é necessário evitar mudanças
extremas e abruptas, tanto de velocidade quanto de
aceleração, e o movimento deve ser o mais suave
possível para que as peças não sejam danificadas. Esse
aspecto aparece no gráfico hipotético mostrado pela
presença de arestas proeminentes ("cantos vivos"), que,
em um sistema físico realista, não devem ocorrer e a
função deve apresentar, de fato, um comportamento
suave, com cantos arredondados.
De acordo com o gráfico da velocidade em função do tempo, assinale a alternativa correta que mostra como deve ser o comportamento da aceleração em função do tempo para o robô nessas condições:
De acordo com o gráfico da velocidade em função do tempo, assinale a alternativa correta que mostra como deve ser o comportamento da aceleração em função do tempo para o robô nessas condições: