Foram encontradas 200 questões.
No que se refere ao processo de soldagem do tipo brasagem nas tubulações frigoríficas é correto afirmar que:
Provas
Questão presente nas seguintes provas
O controle de velocidade de um circuito hidráulico pode ser feito pelo processo meter-out meter-in e por desvio. È correto afirmar que no controle meter-out:
Provas
Questão presente nas seguintes provas
Em um mapa de risco de uma oficina mecânica, um estudante notou que havia as seguintes observações referentes às cores azul, amarelo, verde, vermelho. Essas cores representam quais tipos de riscos, respectivamente?
Provas
Questão presente nas seguintes provas
Resultado de uma medição, menos a média de uma grande amostragem infinita de medições de um mesma medida de uma única amostra repetitivamente.
- Média que resulta de um infinito número de medições de uma mesma medida de uma única amostra repetitivamente, menos o valor verdadeiro da amostra. São respectivamente conceitos de:
- Média que resulta de um infinito número de medições de uma mesma medida de uma única amostra repetitivamente, menos o valor verdadeiro da amostra. São respectivamente conceitos de:
Provas
Questão presente nas seguintes provas
Em uma sala de metrologia a temperatura deve ser mantida a 20 ºC. Um equipamento condicionador de ar será instalado para manter a temperatura especificada, mesmo em dias quentes em que as faces externas das paredes estiverem a 41,4 ºC. Qual o calor a ser extraído da sala pelo condicionador de ar em dias quentes?
Dados: a sala possui 10 m de comprimento, 5 m de largura e 5 m de altura; o teto e o piso são desconsiderados para os cálculos, pois estão bem isolados; considere 1 HP ≅ 642 Kcal/h; o coeficiente global de transferência de calor U = 2 Kcal/hm2 ºC.
Dados: a sala possui 10 m de comprimento, 5 m de largura e 5 m de altura; o teto e o piso são desconsiderados para os cálculos, pois estão bem isolados; considere 1 HP ≅ 642 Kcal/h; o coeficiente global de transferência de calor U = 2 Kcal/hm2 ºC.
Provas
Questão presente nas seguintes provas
Em relação à classificação dos robôs pelo tipo de articulação e à área de trabalho, os robôs PPP e RPP alcançam, respectivamente,
Provas
Questão presente nas seguintes provas
Na programação de robôs industriais é necessário a localização tridimensional dos elos, das articulações e do órgão terminal. Essa localização é formalmente definida por um vetor de posição e sua movimentação relacionada por matrizes de rotação. A posição do órgão terminal é dada pelo vetor A P = [1 3 0] T se for girado em torno do eixo Z em 30º, qual sua posição após o movimento?
Provas
Questão presente nas seguintes provas
A utilização de sensores nos robôs industriais está além do próprio funcionamento do robô, sendo utilizado para a interação com as operações e com o ambiente. Um manipulador industrial deve reconhecer o tipo de material da peça e alterar a força do órgão terminal. Nesse sistema há peças metálicas e plásticas, para realizar a tarefa foram utilizados sensores
Provas
Questão presente nas seguintes provas
A figura a seguir representa a forma de uma coluna flambada.
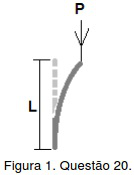
O tipo de fixação e o comprimento livre de flambagem representado na figura são, respectivamente,
O tipo de fixação e o comprimento livre de flambagem representado na figura são, respectivamente,
Provas
Questão presente nas seguintes provas
A figura representa um sistema de transmissão por correias.
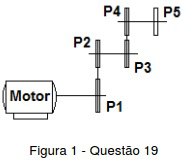
Dados: Diâmetros das polias: DP1 = 216 mm; DP2 = 540 mm; DP3 = 220 mm; DP4 = 440 mm; DP5 = 250 mm. Mt (motor) = 100 Nm. n = 1200 rpm. Desprezar as perdas.
Qual a força tangencial na polia 5 (P5)?
Dados: Diâmetros das polias: DP1 = 216 mm; DP2 = 540 mm; DP3 = 220 mm; DP4 = 440 mm; DP5 = 250 mm. Mt (motor) = 100 Nm. n = 1200 rpm. Desprezar as perdas.
Qual a força tangencial na polia 5 (P5)?
Provas
Questão presente nas seguintes provas
Cadernos
Caderno Container