Foram encontradas 80 questões.
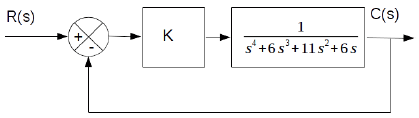
Determine quais os valores do ganho proporcional K, para que o sistema a seguir seja estável:
Provas
Faça uma leitura atenta das afirmações apresentadas abaixo sobre as principais características de um controle derivativo e marque verdadeiro (V) ou falso (F). Depois, assinale a opção que contenha a sequência exata a partir da primeira assertiva:
( ) A correção é proporcional à velocidade de desvio.
( ) Não atua caso o desvio seja constante.
( ) Quanto mais rápida a razão de mudança do desvio, menor será a correção.
Provas
Sobre sistema de controle em malha fechada é incorreto afirmar que:
Provas
Um robô de coordenadas cartesianas pode ser considerado:
Provas
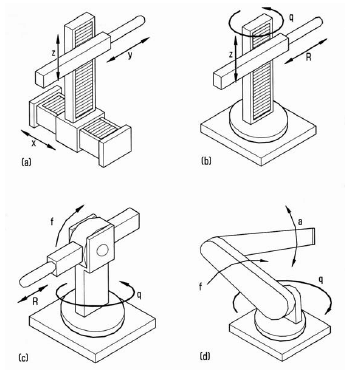
Os robôs industriais, possuem uma variedade de tamanhos, formas e configurações físicas. A maioria das configurações utilizadas atualmente são mostradas nas figuras abaixo. Identifique as configurações de cada figura, respectivamente:
Provas
A precisão dos movimentos de um robô industrial depende de três fatores. A seguir temos suas definições, identifique-as em sequência.
[1] – Define-se como o menor incremento do movimento que pode executar o robô.
[2] – Refere-se à capacidade de um robô para situar o extremo de seu punho em um ponto marcado dentro do volume de trabalho.
[3] – Refere-se à capacidade do robô de regressar ao ponto que foi lhe programado às vezes que sejam necessárias.
Provas
Um microcontrolador com arquitetura Risc, possui um clock de 20 MHz, e todas as instruções são executadas em 8 ciclos de clock. Se um dispositivo externo solicitar uma interrupção, serão necessários 3 instruções para atendê-lo. Quanto tempo será necessário para microcontrolador atender o dispositivo?
Provas
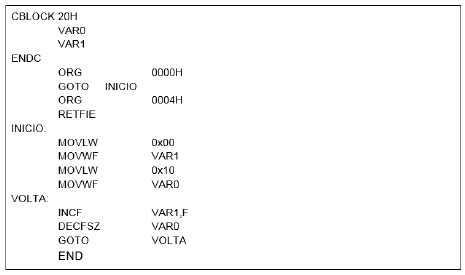
Considere o trecho de programa em Assembley do microcontrolador PIC16F. Quais os valores armazenados nas variáveis VAR0 e VAR1, respectivamente?
Provas
Na programação em Assembly do Microcontrolador 8051, o comando: MOV A, 12
Provas
Ao observamos o fragmento de programa de um microcontrolador PIC em linguagem C, podemos determinar o valor que deve ser assumido pelas variáveis X e Y. Indique qual é esse valor:
Boolean x, y;
#use fixed_io (c_output = pin_c0, pin_c2);
output_high (pin_c0);
output_low (pin_c0);
x = input (pin_c0);
output_high (pin_c2);
output_low (pin_c2);
Y = input (pin_c2);
Provas
Caderno Container