Foram encontradas 1.925 questões.
O datum é a origem de um sistema geodésico e pode ser horizontal, vertical ou ambos. Ele é definido por
Provas
Questão presente nas seguintes provas
Considere o descrito a seguir para responder a questão.
Para realizar a correlação entre os dois referenciais geodésicos, são utilizados basicamente dois modelos de transformação: o de Bursa-Wolfe e o de Molodensky, cujas equações estão descritas abaixo.
!$ U=σ RX+ \Delta=\begin{bmatrix}u \\ v \\ w \end{bmatrix}-σ \begin{bmatrix}1 & \kappa & -φ \\ -\kappa & 1 & ω \\ φ & -ω & 1\end{bmatrix} \begin{bmatrix}x \\ y \\ z \end{bmatrix}+ \begin{bmatrix}\Delta x \\ \Delta y \\ \Delta z \end{bmatrix} !$ Equações de Bursa-Wolfe
onde !$ u !$, !$ v !$ e !$ w !$ são as coordenadas no sistema 1
!$ x !$, !$ y !$ e !$ z !$ são as coordenadas no sistema 2
!$ σ !$ é um fator de escala
!$ \kappa !$, !$ φ !$ e !$ \varpi !$ são ângulos de rotação
!$ \Delta x !$, !$ \Delta y !$ e !$ \Delta z !$ são parâmetros de translação
!$ \begin{cases} \Delta \Phi= \large{- \Delta \sin \Phi \cos λ \, - \, \Delta y \sin \Phi \sin λ + \Delta z \cos \Phi \, + \, (f \Delta a+a \Delta f) \sin 2 \Phi \over R_M} \end{cases} !$
!$ \begin{cases}\Delta λ= \large{- \Delta x \sin λ + \Delta y \cos λ \over R_N \cos \Phi} \end{cases} !$
!$ \begin{cases}\Delta h=\Delta x \cos \Phi \cos λ + \Delta y \cos \Phi \sin λ + \Delta z \sin \Phi + (f \Delta a + a \Delta f) \sin^2 \Phi- \Delta a \end{cases} !$
onde !$ \Phi !$, !$ λ !$ e h são as coordenadas no sistema 1
x, y e z são as coordenadas no sistema 2
!$ \Delta a !$ é a diferença entre os comprimentos dos semieixos maiores
!$ \Delta f !$ é a diferença entre os valores do achatamento
!$ \Delta x !$, !$ \Delta y !$ e !$ \Delta z !$ são parâmetros de translação
Pode-se perceber que, no modelo de Bursa-Wolfe, são introduzidas coordenadas cartesianas do ponto, enquanto que, no modelo de Molodensky reduzido, as coordenadas estão em sua forma elipsóidica. Assim, para selecionar um modelo em detrimento do outro, faz-se necessário transformar as coordenadas cartesianas em geodésicas ou vice-versa, conforme ilustra a figura a seguir.
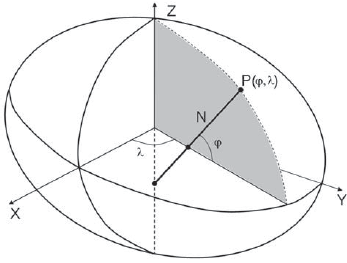
Nesse esquema, o parâmetro N representa o(a)
Provas
Questão presente nas seguintes provas
Considere o descrito a seguir para responder a questão.
Para realizar a correlação entre os dois referenciais geodésicos, são utilizados basicamente dois modelos de transformação: o de Bursa-Wolfe e o de Molodensky, cujas equações estão descritas abaixo.
!$ U=σ RX+ \Delta=\begin{bmatrix}u \\ v \\ w \end{bmatrix}-σ \begin{bmatrix}1 & \kappa & -φ \\ -\kappa & 1 & ω \\ φ & -ω & 1\end{bmatrix} \begin{bmatrix}x \\ y \\ z \end{bmatrix}+ \begin{bmatrix}\Delta x \\ \Delta y \\ \Delta z \end{bmatrix} !$ Equações de Bursa-Wolfe
onde !$ u !$, !$ v !$ e !$ w !$ são as coordenadas no sistema 1
!$ x !$, !$ y !$ e !$ z !$ são as coordenadas no sistema 2
!$ σ !$ é um fator de escala
!$ \kappa !$, !$ φ !$ e !$ \varpi !$ são ângulos de rotação
!$ \Delta x !$, !$ \Delta y !$ e !$ \Delta z !$ são parâmetros de translação
!$ \begin{cases} \Delta \Phi= \large{- \Delta \sin \Phi \cos λ \, - \, \Delta y \sin \Phi \sin λ + \Delta z \cos \Phi \, + \, (f \Delta a+a \Delta f) \sin 2 \Phi \over R_M} \end{cases} !$
!$ \begin{cases}\Delta λ= \large{- \Delta x \sin λ + \Delta y \cos λ \over R_N \cos \Phi} \end{cases} !$
!$ \begin{cases}\Delta h=\Delta x \cos \Phi \cos λ + \Delta y \cos \Phi \sin λ + \Delta z \sin \Phi + (f \Delta a + a \Delta f) \sin^2 \Phi- \Delta a \end{cases} !$
onde !$ \Phi !$, !$ λ !$ e h são as coordenadas no sistema 1
x, y e z são as coordenadas no sistema 2
!$ \Delta a !$ é a diferença entre os comprimentos dos semieixos maiores
!$ \Delta f !$ é a diferença entre os valores do achatamento
!$ \Delta x !$, !$ \Delta y !$ e !$ \Delta z !$ são parâmetros de translação
Sobre esses modelos de transformação, analise as afirmações a seguir.
I - O conhecimento das coordenadas de dois pontos em cada datum é sufi ciente para determinar os sete parâmetros da transformação.
II - O cálculo da latitude e longitude geodésicas nas equações de Molodensky reduzidas desconsidera o prévio conhecimento da altitude elipsoidal do ponto.
III - A transformação de Molodensky reduzida ignora as rotações dos eixos entre os dois sistemas que, por sua vez, são consideradas no modelo de Bursa-Wolfe.
Está correto APENAS o que se afirma em
Provas
Questão presente nas seguintes provas
Acerca do sistema UTM, analise as afirmativas a seguir.
I - Cada fuso pode ser prolongado até 30’ sobre os fusos adjacentes, criando-se assim uma área de superposição de 1º de largura.
II - A origem do sistema pode ser deslocada do centro do fuso para algum ponto que facilite o mapeamento de determinada região.
III - O sistema UTM é um sistema tridimensional, visto que fornece as coordenadas E, N e H de cada ponto.
É correto APENAS o que se afirma em
Provas
Questão presente nas seguintes provas
A latitude geodésica de um ponto P qualquer, na superfície de um elipsoide, é o ângulo medido sobre o meridiano que passa por P, compreendido entre a(o)
Provas
Questão presente nas seguintes provas
Para realização do método de interseção, devem ser medidos
Provas
Questão presente nas seguintes provas
Na execução de uma poligonal, o primeiro lado, partindo da estação E0 para a estação E1, possui azimute 130º. Posteriormente, a estação
A leitura angular observada na direção da estação E2 foi de 70º, logo, o azimute do lado E1-E2 é
Provas
Questão presente nas seguintes provas
Poligonais iniciadas e finalizadas sobre estações distintas, com coordenadas conhecidas, permitem realizar APENAS o(s) controle(s)
Provas
Questão presente nas seguintes provas
De acordo com a Norma Brasileira para a Execução de Levantamento Topográfico, é previsto o emprego dos métodos de nivelamento taqueométrico,
Provas
Questão presente nas seguintes provas
Os sistemas geodésicos são associados a figuras geométricas cujas superfícies se adaptam à região da Terra a ser representada, em especial, elipsoides de revolução.
A correta associação entre elipsoide e sistema de coordenadas é
Provas
Questão presente nas seguintes provas
Cadernos
Caderno Container