Foram encontradas 8.955 questões.
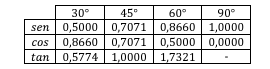
Quando necessário, adote os seguintes valores:
Assinale a alternativa que descreve, CORRETAMENTE, a relação entre Geomática e Geodésia:
Provas
Quando necessário, adote os seguintes valores:
É INCORRETO afirmar que topografia:
Provas
Quando necessário, adote os seguintes valores:
O modelo de superfície terrestre comumente adotado em cartografia é o:
Provas
Quando necessário, adote os seguintes valores:
De acordo com a NBR 13.133/2021, na concepção de desenhos topográficos, o erro de graficismo, ou seja, o erro máximo admissível na elaboração de desenho topográfico para lançamento de pontos e traçados de linhas equivale a duas vezes a acuidade visual, que é de:
Provas
Quando necessário, adote os seguintes valores:
É necessário representar uma rua com 600 metros de comprimento real em uma planta de loteamento urbano, utilizando a escala 1:2.500. A extensão dessa rua na planta citada é de:
Provas
De acordo com a norma NBR 13.333/2021, é necessário estabelecer os procedimentos aplicáveis na execução dos levantamentos topográficos, assim como definir as diretrizes para a representação gráfica dos elementos no desenho técnico topográfico. Considerando as convenções topográficas estabelecidas pela norma, analise os itens a seguir:

Assinale a alternativa que apresenta a correspondência CORRETA:
Provas
De acordo com a norma NBR 13.333/2021, o relatório técnico elaborado ao término de um levantamento topográfico deve conter, no mínimo, as seguintes informações, EXCETO:
Provas
O sistema de projeção Universal Transversa de Mercator (UTM) foi adotado pela Diretoria de Serviço Geográfico do Exército e pelo IBGE como padrão para o mapeamento sistemático do país. Analise as afirmativas a seguir:
I. O UTM é um sistema de projeção cartográfica e corresponde a uma modificação da projeção de Mercator, onde o cilindro secante é colocado em posição transversal.
II. O sistema é constituído por 60 fusos de 3º de longitude, numerados a partir do antimeridiano de Greenwich, seguindo de oeste para leste.
III. O eixo central do fuso, denominado como meridiano central, estabelece, junto com a linha do Equador, a origem do sistema de coordenadas de cada fuso.
IV. O fator de escala "K" ou coeficiente deformação linear é variável conforme o afastamento em relação ao Meridiano Central.
V. O valor do fator de escala "K" ou coeficiente deformação linear sobre as linhas de secância é igual a 0,9996.
Assinale a alternativa CORRETA:
Provas
Considere a situação na qual as estacas ao longo de uma estrada estão espaçadas a cada 20 \( m \) e que as áreas das seções transversais nas estacas 46, 47 e 48 são aquelas apresentadas na tabela a seguir:
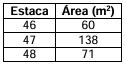
Utilizando o método da área média, o volume total de aterro entre as estacas 46 e 48 é igual a:
Provas
A sigla GNSS (Global Navigation Satellite System) refere-se a um conjunto de sistemas de navegação por satélite com cobertura global, incluindo infraestruturas espaciais e terrestres que, em conjunto, proporcionam maior precisão e confiabilidade no posicionamento. Sabendo que o posicionamento por GNSS pode ser realizado por diferentes métodos e procedimentos, analise as afirmativas a seguir:
I. Os sistemas englobados pelo GNSS incluem: NAVSTAR-GPS (NAVigation System with Timing And Ranging – Global Positioning System), sistema norte-americano; GLONASS (Globalnaya Navigatsionnaya Sputnikovaya Sistema), sistema russo; Galileo, sistema europeu; e Compass/Beidou (China’s Compass Navigation Satellite System – CNSS), sistema chinês.
II. No posicionamento relativo, as coordenadas do vértice de interesse são determinadas a partir de um ou mais vértices de coordenadas conhecidas. Para isso, é necessário que dois ou mais receptores GNSS coletem dados simultaneamente, sendo que ao menos um dos receptores ocupe um vértice de referência.
III. O conceito de posicionamento pelo RTK (Real Time Kinematic) e DGPS (Differential GPS) baseia-se na transmissão de dados pós-processamento de correções dos sinais de satélites, a partir de receptores instalados nos pontos de referência para os receptores móveis que percorrem os pontos de interesse.
IV. No sistema RTK em rede, há apenas uma estação de referência de monitoramento contínuo, que está conectada a um servidor central, que distribui os dados de correção para os receptores móveis via Internet.
V. No posicionamento por ponto preciso (Precise Point Positioning - PPP), as coordenadas do vértice de interesse são determinadas de forma absoluta utilizando efemérides precisas, dispensando o uso de receptor instalado sobre um vértice de coordenadas conhecidas.
VI. O Posicionamento por Ponto Preciso em Tempo Real (Real Time Precise Point Positioning - PPP RTK) é um método que permite determinar as coordenadas de um ponto de interesse de forma absoluta utilizando correções transmitidas em tempo real por uma rede geodésica global, com a utilização de apenas um receptor ao nível do usuário.
Assinale a alternativa CORRETA:
Provas
Caderno Container