Foram encontradas 658 questões.
Um controlador lógico programável (CLP), possui, dentre suas possíveis linguagens de programação, linguagem
Ladder.
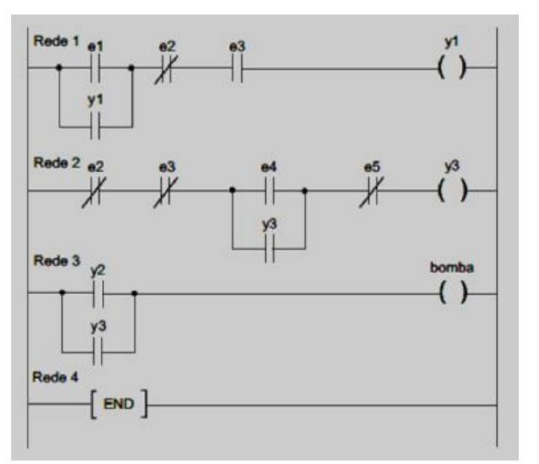
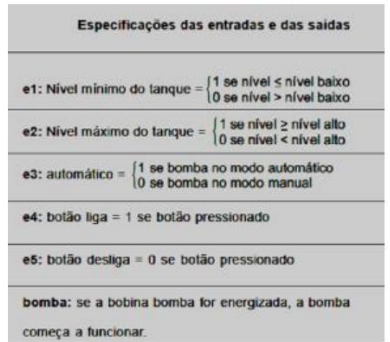
Observe a seguir um programa desenvolvido em linguagem Ladder utilizado para comandar o abastecimento de água em um reservatório através de uma bomba.
Tomando como base o programa apresentado e as especificações de suas entradas, indique a afirmação incorreta.
Observe a seguir um programa desenvolvido em linguagem Ladder utilizado para comandar o abastecimento de água em um reservatório através de uma bomba.
Tomando como base o programa apresentado e as especificações de suas entradas, indique a afirmação incorreta.
Provas
Questão presente nas seguintes provas
Sistemas supervisórios são sistemas informatizados que visam atender às necessidades de processos industriais.
Assinale, dentre as afirmativas abaixo, aquela que corretamente descreve funcionalidades e características de sistemas supervisórios.
Assinale, dentre as afirmativas abaixo, aquela que corretamente descreve funcionalidades e características de sistemas supervisórios.
Provas
Questão presente nas seguintes provas
Analise as afirmativas a seguir sobre redes industriais:
I. Os terminadores de rede são utilizados para não ocorrer reflexão dos sinais nas extremidades do meio físico, evitando ruídos e falhas de comunicação.
II. O cabo UTP (unshielded twisted pair) não possui nenhuma tecnologia para reduzir o crosstalk.
III. As redes Foundation Fieldbus H1 e Profibus PA possuem a vantagem de permitir a alimentação de dispositivos pelo próprio barramento de comunicação.
Está(ão) correta(s) a(s) afirmação(ões):
I. Os terminadores de rede são utilizados para não ocorrer reflexão dos sinais nas extremidades do meio físico, evitando ruídos e falhas de comunicação.
II. O cabo UTP (unshielded twisted pair) não possui nenhuma tecnologia para reduzir o crosstalk.
III. As redes Foundation Fieldbus H1 e Profibus PA possuem a vantagem de permitir a alimentação de dispositivos pelo próprio barramento de comunicação.
Está(ão) correta(s) a(s) afirmação(ões):
Provas
Questão presente nas seguintes provas
As redes industriais são largamente utilizadas para troca de informações entre dispositivos sensores, atuadores,
conversores, controladores, entre outros. Vários protocolos de comunicação foram desenvolvidos de modo a
atender melhor uma gama de aplicações.
Assinale a alternativa correta sobre os protocolos empregados nas redes industriais:
Assinale a alternativa correta sobre os protocolos empregados nas redes industriais:
Provas
Questão presente nas seguintes provas
Avalie as seguintes afirmativas sobre sistemas hidráulicos e pneumáticos.
I. O fluido utilizado em sistemas pneumáticos necessita ser colocado em condições apropriadas, isento de impurezas e umidade.
II. As forças exercidas por atuadores pneumáticos são, em geral, consideravelmente superiores àquelas exercidas por atuadores hidráulicos.
III. A compressibilidade dos fluidos envolvidos em sistemas pneumáticos colabora para a lubrificação do sistema.
Está(ão) correta(s) a(s) afirmação(ões):
I. O fluido utilizado em sistemas pneumáticos necessita ser colocado em condições apropriadas, isento de impurezas e umidade.
II. As forças exercidas por atuadores pneumáticos são, em geral, consideravelmente superiores àquelas exercidas por atuadores hidráulicos.
III. A compressibilidade dos fluidos envolvidos em sistemas pneumáticos colabora para a lubrificação do sistema.
Está(ão) correta(s) a(s) afirmação(ões):
Provas
Questão presente nas seguintes provas
Considere o circuito pneumático apresentado na figura abaixo.
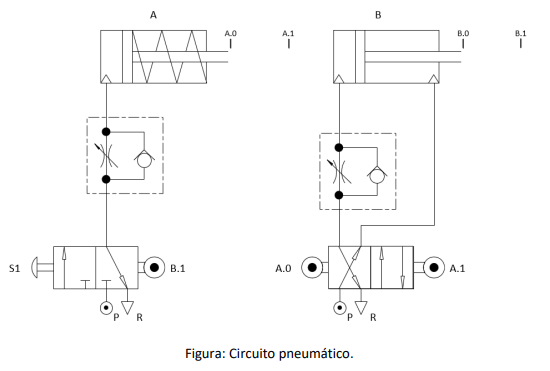
Quando a chave S1 é acionada ocorre uma sequência de acionamentos em que é correto afirmar que:
Provas
Questão presente nas seguintes provas
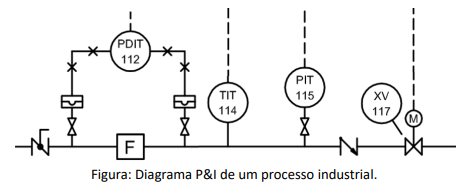
Considere o trecho de diagrama P&I apresentado na figura abaixo.
Analise as afirmativas a seguir:
I. O instrumento identificado por XV-117 possui atuador do tipo mola e diafragma. II. O instrumento identificado por PDIT-112 faz a conversão de um sinal pneumático para um sinal elétrico. III. Todos os instrumentos transmissores identificados são capazes também de indicar a medição em campo.
Está(ão) correta(s) a(s) afirmação(ões):
Analise as afirmativas a seguir:
I. O instrumento identificado por XV-117 possui atuador do tipo mola e diafragma. II. O instrumento identificado por PDIT-112 faz a conversão de um sinal pneumático para um sinal elétrico. III. Todos os instrumentos transmissores identificados são capazes também de indicar a medição em campo.
Está(ão) correta(s) a(s) afirmação(ões):
Provas
Questão presente nas seguintes provas
Para uma medição de pressão, dois extensômetros foram utilizados em conjunto com um circuito ponte,
conforme figura a seguir.
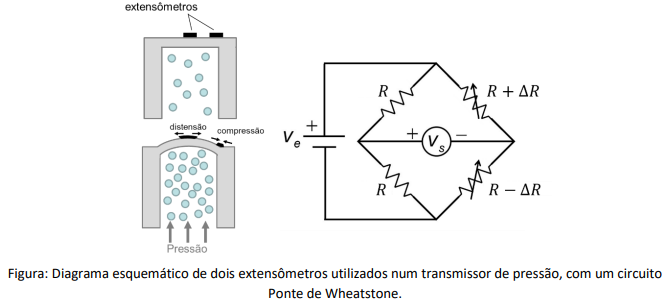
Sabe-se ∆R que é zero para uma pressão manométrica nula e que, para uma pressão manométrica de 15 psi tem-se ∆R = 10 Ω . Considerando Ve = 9 V , o valor de R que produz uma sensibilidade de 100 mV / psi é:
Sabe-se ∆R que é zero para uma pressão manométrica nula e que, para uma pressão manométrica de 15 psi tem-se ∆R = 10 Ω . Considerando Ve = 9 V , o valor de R que produz uma sensibilidade de 100 mV / psi é:
Provas
Questão presente nas seguintes provas
A curva de calibração estática de um transmissor de pressão foi obtida a partir da execução de um procedimento
adequado, com um padrão de trabalho rastreável. Os pontos obtidos e a respectiva reta de calibração são
apresentados na figura a seguir.
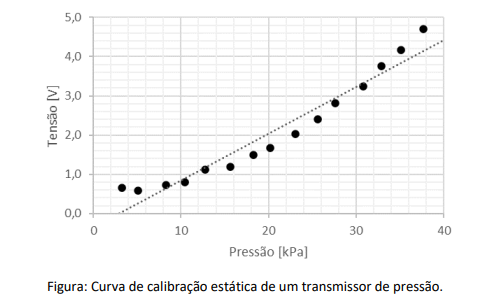
Com base na curva de calibração apresentada, é possível afirmar que:
Com base na curva de calibração apresentada, é possível afirmar que:
Provas
Questão presente nas seguintes provas
A figura abaixo apresenta um robô definido no espaço plano com cadeia cinemática do tipo RRP,
sendo que R representa uma junta de revolução e P representa uma junta do tipo prismática.
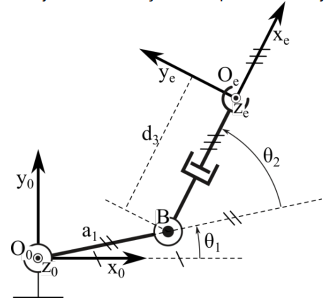
O robô RRP possui como base de referência o sistema de coordenadas O0–x0y0z0 e o sistema de coordenadas Oe–xeyeze fixo no elo do efetuador. A primeira junta de revolução tem seu eixo de rotação na direção e sentido do eixo z0 (perpendicular aos eixos x0 e y0, ou seja, saindo da página) passando pela origem do sistema de coordenadas da base em O0, com deslocamento de junta definido pelo ângulo θ1, medido entre o eixo x0 e a reta definida pelos pontos O0 e B, sobre o elo a1. A segunda junta de revolução tem eixo de rotação paralelo ao eixo da primeira junta de revolução, ou seja, na direção e sentido de z0, mas passando pelo ponto B, com deslocamento de junta definido pelo ângulo θ2, medido entre a reta definida entre os pontos O0 e B (alongamento tracejado na figura) e a reta definida entre os pontos B e a origem Oe. A terceira junta prismática tem seu eixo na direção e sentido do eixo xe (eixo x do sistema de coordenadas do efetuador) definido pela relação
xe = Oe − B / ‖Oe − B‖
passando pelo ponto B, com deslocamento d3, correspondente à distância entre os pontos B e Oe. Com respeito ao robô RRP, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) Não é possível gerar movimento de deslocamento para o efetuador do robô RRP na direção de z0. ( ) O robô RRP possui quatro graus de mobilidade. ( ) O volume de trabalho do robô RRP é cilíndrico. ( ) O robô RRP não possui singularidades.
O robô RRP possui como base de referência o sistema de coordenadas O0–x0y0z0 e o sistema de coordenadas Oe–xeyeze fixo no elo do efetuador. A primeira junta de revolução tem seu eixo de rotação na direção e sentido do eixo z0 (perpendicular aos eixos x0 e y0, ou seja, saindo da página) passando pela origem do sistema de coordenadas da base em O0, com deslocamento de junta definido pelo ângulo θ1, medido entre o eixo x0 e a reta definida pelos pontos O0 e B, sobre o elo a1. A segunda junta de revolução tem eixo de rotação paralelo ao eixo da primeira junta de revolução, ou seja, na direção e sentido de z0, mas passando pelo ponto B, com deslocamento de junta definido pelo ângulo θ2, medido entre a reta definida entre os pontos O0 e B (alongamento tracejado na figura) e a reta definida entre os pontos B e a origem Oe. A terceira junta prismática tem seu eixo na direção e sentido do eixo xe (eixo x do sistema de coordenadas do efetuador) definido pela relação
xe = Oe − B / ‖Oe − B‖
passando pelo ponto B, com deslocamento d3, correspondente à distância entre os pontos B e Oe. Com respeito ao robô RRP, indique se as afirmativas a seguir são verdadeiras (V) ou falsas (F) e assinale a alternativa com a sequência correta de cima para baixo.
( ) Não é possível gerar movimento de deslocamento para o efetuador do robô RRP na direção de z0. ( ) O robô RRP possui quatro graus de mobilidade. ( ) O volume de trabalho do robô RRP é cilíndrico. ( ) O robô RRP não possui singularidades.
Provas
Questão presente nas seguintes provas
Cadernos
Caderno Container